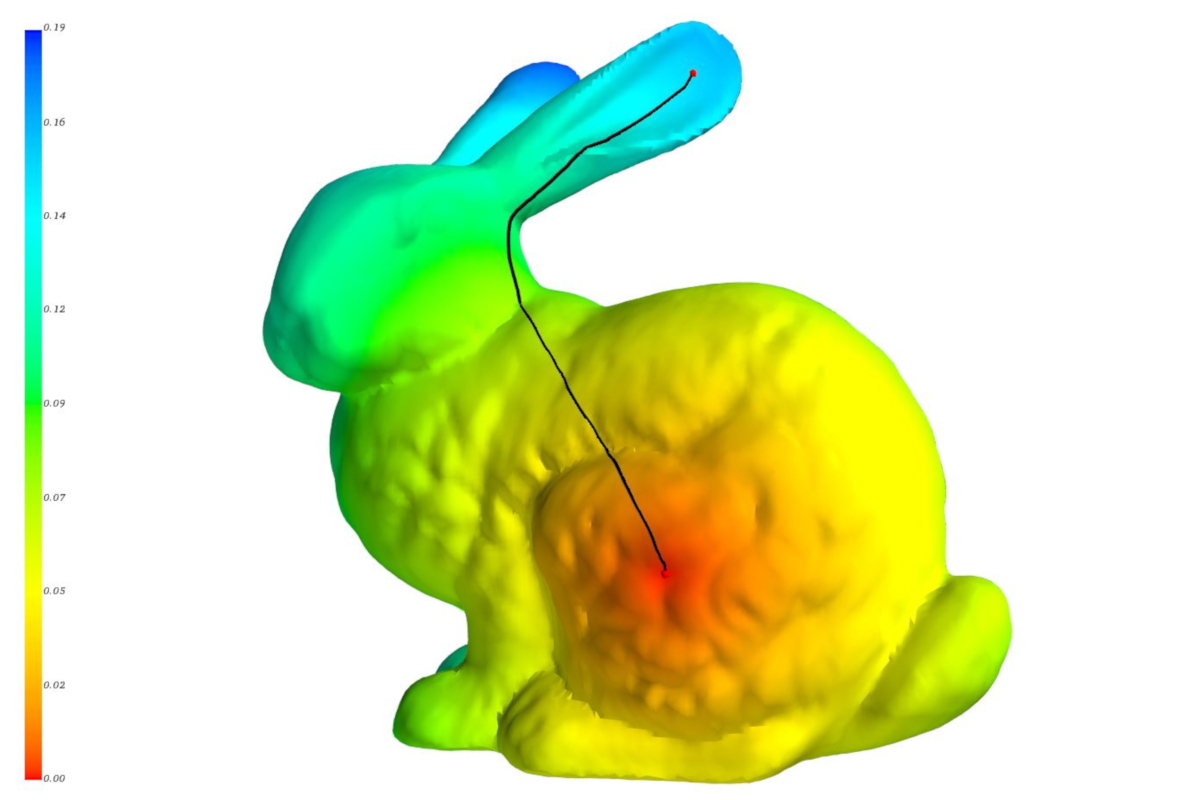
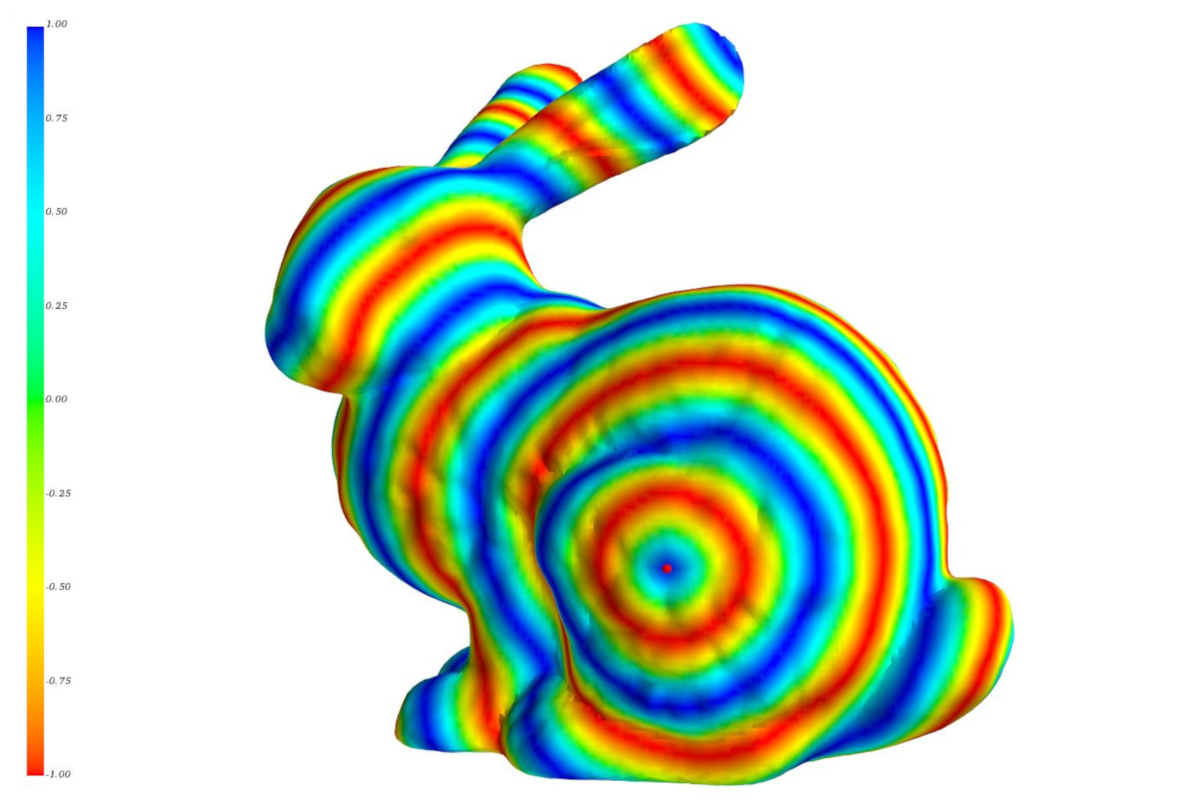
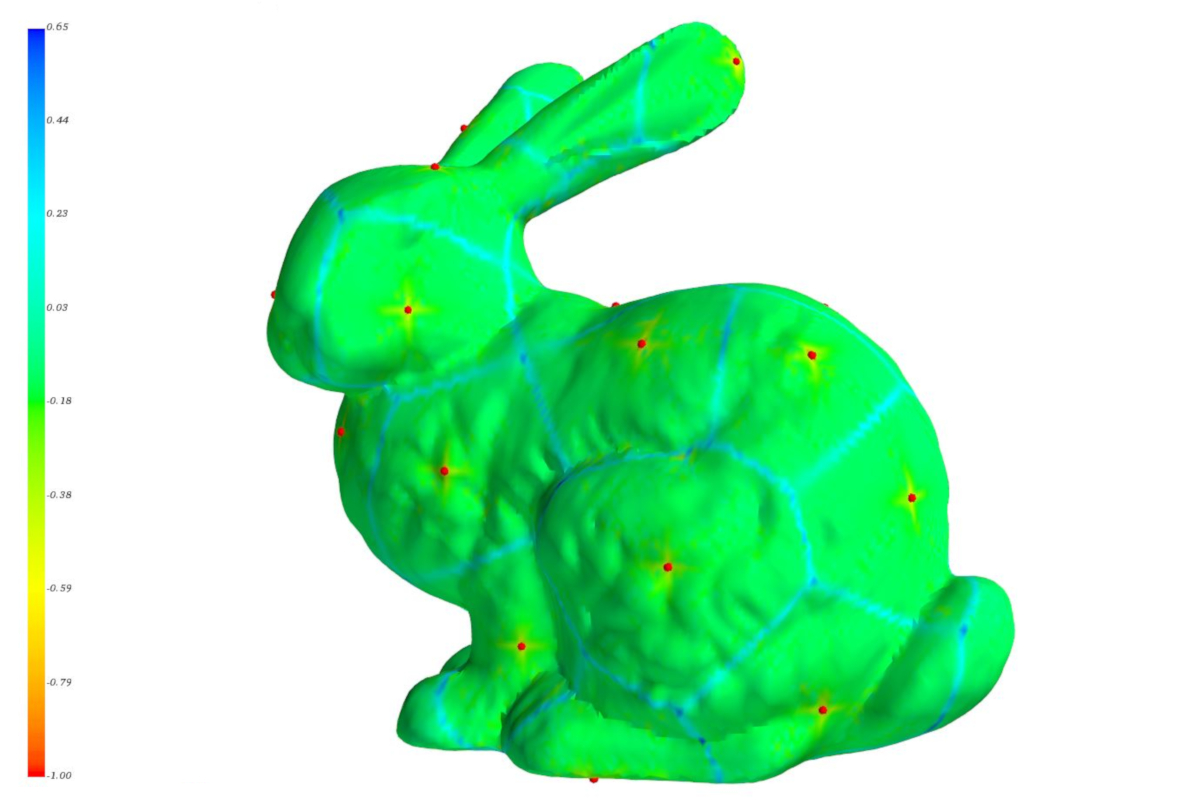
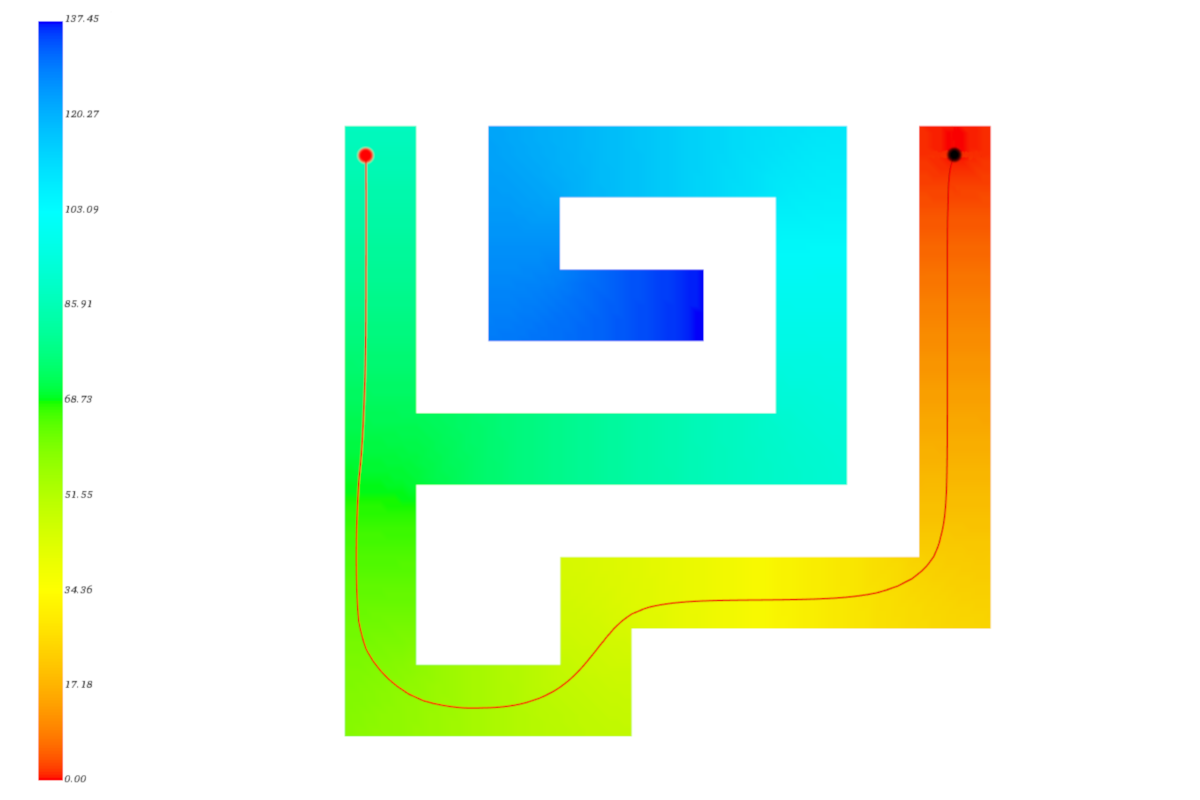
Erilaisia algoritmeja on toteutettu ja vertailtu lyhimmän polun löytämiseksi kahden pisteen välillä kaarevalla pinnalla. Värikartta visualisoi geodeettiset etäisyydet vapaasti valittavaan lähtöpisteeseen mallin pinnalla. Polku yhteen tai useampaan valittuun pisteeseen poimitaan ja geometriatiedot asetetaan saataville jatkokäyttöä varten. [Lähde, 3D-malli, Stanford Bunny: Stanfordin yliopiston tietokonegrafiikan laboratorio]
HANKKEEN KUVAUS
ESITYSTYYPPI
- Ohjelmistojen kehittäminen
- Laskenta
- Täytäntöönpano
- Visualisointi
KÄYTETYT TYÖKALUT
- Python, ohjelmointikieli
- C++, ohjelmointikieli
ALGORITMIT
- Lämpömenetelmä
- Nopea marssi menetelmä
ASIAKAS
Oma kehitys
LOHKO
- CAM, työkalupolut
- Robotiikka, polkusuunnittelu
- Navigointi, paikkatietojärjestelmät
- Sähkötekniikka, piirikaaviot